




基于LPC2138的注塑機控制器設計
現代注塑機的發展重點在于提高控制水平和整機自動化程度,以及整機優化設計和加工工藝的改進方面,以滿足對于注塑制品質量及節能的要求。隨著微電子技術的發展,嵌入式系統芯片以集成度高,價格低,性能強大而得到廣泛應用。利用32位的ARM處理器實現注塑生產過程的自動控制,實時顯示并在線修改各階段的過程參數,這不僅提高了注塑機自動化程度,而且大大提高了塑料制品的生產效率和產品質量。
1 注塑機的組成及其工作過程
1.1 注塑機的組成
該控制器以電動一液壓相結合的復合式注塑機為控制對象,它是集機-電-液于一體的典型系統。它主要由液壓油路系統、合模系統、注射系統、加熱冷卻系統、潤滑系統、電氣控制系統、安全保護裝置、監測系統及供料等輔助系統組成。注塑機的各個部分互相牽制、互相協調地完成注塑機的循環動作。其中電氣控制系統是注塑機的“中樞神經”,它控制著注塑機的各種程序及動作,對時間、位置、壓力、速度和轉速等進行有效的控制與調節。該控制器實現注塑機電氣控制系統的控制功能。
1.2 注塑機的工作過程
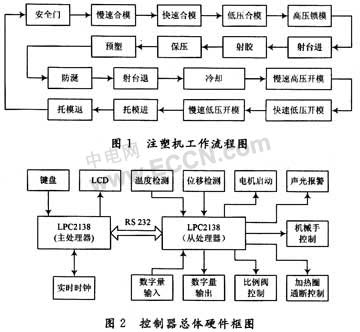
現代注塑機的控制器主要由注塑機工藝流程控制、料筒溫度控制、人機界面等部分組成,能夠實現對注塑機整個工藝流程進行控制;對注塑過程中的流量、壓力、位置以及料桶溫度的控制;對注塑工作過程參數的顯示與在線參數修改。注塑機的工作過程其實就是一個過程控制。當要執行某一個動作時,控制器必須輸出相應的控制信號使相關的電磁閥通電,否則不能正常工作,而當檢測到對應的行程開關或接近開關的輸入信號后,就可撤除控制信號使電磁閥失電,以結束該動作,然后根據工藝要求進行下一個動作或停止工作。其工作流程如圖1所示。
2 系統硬件電路的設計
該控制器由2個控制模塊構成,采用主從式結構來控制注塑機的注塑過程、溫度、人機界面、通信等工作。兩個控制模塊各由一個處理器來進行管理,處理器均采用ARM處理器LPC2138,其中一個處理器負責鍵盤及LCD顯示管理,實現參數在線設定及顯示,以提供友好的人機界面;另外一個處理器負責檢測注塑機的各路輸入情況,并實現對注塑的過程控制與料筒溫度控制。兩者之間采用RS 232C串行接口進行實時通信以實現信息與數據的交換。系統硬件總體框圖如圖2所示。
鍵盤電路控制器需要實現注塑機的各種動作及控制參數的輸入,因此鍵盤電路必不可少。鍵盤電路采用ZLG7290鍵盤管理器,它可采樣64個按鍵或傳感器,并可檢測每個按鍵的連擊次數,而且具有鍵盤去抖動處理、雙鍵互鎖處理等功能,因此省去了鍵盤掃描及去抖等相關處理軟件的編制,這樣不僅節省了程序空間,而且簡化了編程。每當有按鍵按下,ZI.G7290會產生中斷信號,此時LPC2138可通過I2C接口從ZLG7290內部讀取鍵值,這樣就可判斷出按鍵的具體位置。
液晶顯示 LCD模塊選用320×240圖形點陣型液晶顯示模塊,主機設計有與LCD模塊的接口,可以將其介入,這樣就可實現對注塑機工藝參數的實時監視、各個關鍵參數的在線修改以及命令輸入提示。
數字量輸入/輸出電路 數字量的輸入與輸出均通過光耦隔離電路,以將控制器與執行機構在電氣上進行隔離,防止高壓產生干擾破壞處理器程序的運行。輸入信號經整形后送往數據總線共ARM處理器讀取。輸出數字量通過功率放大電路后直接驅動執行機構動作。
位移檢測電路 設計有3路位移檢測電路,分別實現對螺桿位置、開關模位置和托模機構的位置檢測,檢測出的位移量作為切換壓力和速度的一個依據。位移檢測采用的傳感器是位移電子尺,位移電子尺給出的信號是模擬信號經A/D轉換器ADS7844得到相應的數字量,LPC2138可以通過SPI口讀取ADS7844的轉換結果。
比例閥控制電路 控制器設計有2路比例閥控制電路,以提供流量和壓力的控制。比例閥的控制采用PWM技術,PWM信號直接由硬件電路產生,PWM信號經過三極管放大后通過達林頓管去驅動比例閥工作。
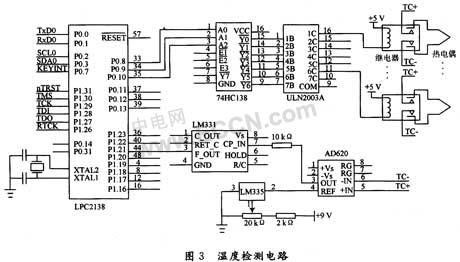
料筒溫度檢測和加熱控制電路 此電路位于從機部分,是本控制器的設計重點,因為料筒溫度對制品的質量有直接的關系。由于加溫系統存在大慣量,加上電源電壓波動等環境因素的影響,往往難以獲得理想的品質因素,因而需要采取相應的軟硬件措施,以獲得穩定、可靠的溫度控制效果。控制器設計有6路溫度檢測通道,溫度檢測傳感器采用K型熱電偶,其測溫范圍為0~400℃。熱電偶信號經過儀表放大器AD620放大后,再將其進行V/F轉換,以實現模/數轉換。采用V/F轉換電路是因為頻率信號的抗干擾能力強,且實現模/數轉換的性價比高。6路溫度檢測的切換采用繼電器控制,以減小導通電阻帶來的溫度測量誤差,且能夠實現信號與系統的隔離。加熱控制電路也采用繼電器控制,繼電器的輸出可直接驅動電磁繼電器或固態繼電器以控制加熱裝置的電源開關。另外熱電偶的冷端補償采用集成溫度傳感器來實現。具體的溫度測量電路如圖3所示。
3 軟件設計
控制器的軟件設計采用模塊化設計。主機部分的軟件分主要包括鍵盤、顯示、通信和實時時鐘模塊。從機部分的軟件相對比較復雜,主要有通信模塊、溫度檢測控制模塊、比例閥控制模塊、位移檢測模塊、工藝流程控制模塊等。
3.1 主機軟件設計
主機部分軟件分2大模塊,即鍵盤與顯示模塊、通信模塊。其中,鍵盤與顯示模塊負責管理64鍵鍵盤和液晶顯示器,由于鍵較多,采用“狀態轉移法”的鍵控程序,根據所按下的鍵執行相應的程序,在液晶顯示器上顯示相應的操作頁面,進行參數設置與顯示,并實時顯示注塑機當前所處的工作狀態。
通訊模塊負責與下位機通信,控制器中的串行通訊也采用主從式結構,即由主機發出通信要求,如參數設置、手動操作、運行狀態讀出等,而從機CPU則根據主機CPU的要求給出回應
3.2 從機軟件設計
從機軟件主要是實現對注塑機工藝流程流程控制。控制器根據當前注塑機所處的工作狀態(手動、半自動、全自動等)以及各個輸入狀態(行程開關、電子尺、鍵盤操作命令等)來控制注塑機的各個工藝流程的進行。在手動模式下,注塑機的各個動作可以單獨執行,如開關模、射膠、座臺動作以及托模動作等。在半自動模式下,注塑機在控制器的控制下動作1個循環,即生產出1件制品,如果需要進行下一個循環,則只要打開在關閉安全門1次即可。全自動模式提供2種方式:一種是時間自動方式;另一種是電眼自動方式,前者是以計時方式來判斷制品的取出,其計時是從最后一次托模退動作終止的時刻開始,該時間可以設定,只要時間一到,注塑機立即進入下一個循環,而后者是根據電眼來檢測制品是否脫落,如果檢測到則立即進入下一個循環,如果在規定時間內沒有檢測到制品落下,則進行報警。
從機軟件設計的重點是溫度控制模塊,也是本文介紹的重點。溫度控制是注塑機必要的環節,其控制性能直接影響產品的質量。它包括溫度檢測和加熱器控制兩個方面。控制器采用模糊控制和常規PID控制相結合的控制算法,并且可以根據實際需要設置成不使用模糊控制或PID控制,此時溫度控制就按時間周期方式進行,即通過設定加熱的時間周期和溫控百分比進行溫度控制。
根據模糊控制理論,當論域為離散時,經過量化后的輸入量的個數是有限的。因此可以針對輸入的不同組合離線計算出相應的控制量,從而組成一張控制表,實際控制時只要直接查這張控制表即可。在ARM處理器中如何實現控制規則表是整個系統的關鍵所在。本系統采用二維矩陣形式存儲控制規則表,例如定義二維矩陣為fuzzyctrl[13][13]。因輸入量偏差E和偏差變化率DE量化后分別為x,y,且x,y={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},則在ARM中可以將其與a,b={0,1,2,3,4,5,6,7,8,9,10,11,12}一一對應。例如,假設E量化后為x=-2,y=3,則在ARM中對應a=4,b=9,查表時只需查fuzzyctrl[4][9],這樣表示無論從數據管理還是從查表方便而言,都具有極大的優勢。這種離線計算、在線查表的模糊控制方法比較容易滿足實時控制的要求。
另外,控制器還結合了傳統的PID控制方法。軟件判斷偏差e的大小范圍,當e>+6℃或e<-6℃時,系統將自動切換到PID控制程序段,使系統能快速響應;當-6℃<P<+6℃時,系統采用模糊控制算法,使系統達到更好的控制效果。在ARM中實現模糊控制時,模糊化采用單點模糊集合,隸屬度函數采用離散方法,也就是連續隸屬度簡單離散化,解模糊仍然采用重心法。溫度檢測程序模塊流程如圖4所示。

4 結語
采用雙處理器對整個控制任務進行合理分割,不僅提高了系統的處理速度和穩定性,而且軟件設計也相對簡單。處理器結合位移傳感器,并按一定的壓力和速度對注塑機實施控制和動態監測,大大提高了產品的精度和質量。料筒溫度控制采用模糊控制結合傳統控制方法PID控制,使溫度控制達到更好的控制效果。該控制器件已在實際生產中獲得了應用,經過半年多的使用,系統運行情況良好、性能穩定。
聲明:本站部分內容根據互聯網資料整理而成,若侵犯您的權益,請聯系我們,我們會盡快處理。